Scientists in many different research domains are eager to run their workloads on the new Intel architectures, particularly Intel® Iris® Xe Graphics and Intel® Data Center GPU Max Series . However, they lack the math libraries they can rely on to execute on these devices. Porting Ginkgo’s linear algebra functionality to the SYCL ecosystem allows them to rely on Ginkgo when running their scientific simulations on Intel Iris Xe Graphics devices.
Ginkgo is the first platform-portable open-source math library supporting Intel GPUs via oneAPI’s open SYCL backend. Domain scientists from different areas rely on Ginkgo and its sparse linear algebra functionality, which forms the base building blocks for many scientific simulations. Existing implementations supported CUDA, HIP, and openMP. Extending Ginkgo Platform portability to Intel GPUs using oneAPI enables applications based on Ginkgo to be vendor-agnostic, demonstrating cross-platform performance on various hardware and programming models. Watch the video implementing a heat equation simulation in the Intel® DevCloud!
Why Does It Matter? Ginkgo is a high-performance linear algebra library for manycore systems, focusing on solving sparse linear systems. It uses modern C++ for a sustainable, flexible, composable, and portable software package. Ginkgo aims to provide domain scientists with high-performance math functionality to enable fast and better science. This is achieved by developing novel algorithms suitable for modern hardware technology and optimizing kernels for specific applications and architectures. With Intel’s MAX series entering the market, we must provide production-ready high-performance math functionality in Ginkgo to enable domain scientists to run their workloads on architectures based on the Intel MAX series.
By porting Ginkgo to oneAPI and supporting Intel Data Center GPU MAX series dedicated to HPC, we can provide high-performance building blocks to simulation frameworks that support Ginkgo, such as deal.II*, MFEM*, OpenFOAM*, HYTEG, Sundials*, XGC*, HiOp*, and OpenCARP* scientific applications, ranging from finite element libraries to computational fluid dynamics, power grid optimization, and heart simulations.
Increasing Platform Portability of Ginkgo Ginkgo supports execution on CUDA, HIP, SYCL accelerators, and OpenMP-enabled CPU devices, so it is mostly GPU-centric. Platform and performance portability are Ginkgo’s critical features. This means that Ginkgo is expected to provide optimal results on various architectures from different vendors.
KIT collaborated with Intel to migrate core functionality from CUDA to SYCL and deliver optimized kernels using the Intel® DPC++ Compatibility Tool and the Intel® oneAPI DPC++/C++ Compiler .
Intel® Developer Cloud initially enabled the Ginkgo team with Intel hardware. It contains a unified pre-configured development environment that helps developers concentrate their efforts on the development tasks. With restricted access permissions, even early access to the latest hardware can be granted. Later, Ginkgo ran Continuous Integration tests on a laptop with Intel® Iris® Xe Graphics before upgrading to the Intel® Arc™ A770 Graphics GPUs.
Deep Dive into Migration We started porting Ginkgo to SYCL in 2020 during the emergence of the oneAPI specification and initiative. Beginning with these early stages and the use of early access to beta versions of oneAPI, we have seen many significant improvements using the Intel® DPC++ Compatibility Tool and the Intel® oneAPI DPC++/C++ Compiler .
Ginkgo was originally designed as a GPU-centric sparse linear algebra library using the CUDA programming language and CUDA design patterns for implementing GPU kernels. The GINKGO HIP backend for targeting AMD GPUs was introduced in early 2020. Migration from CUDA to SYCL started in 2020 as well. The 1.4.0 minor release (Aug 2021) brought most of the Ginkgo functionality to the oneAPI ecosystem, enabling Intel-GPU and CPU execution, excluding preconditioners. Full Data Parallel C++ and SYCL support is available starting with Release 1.5.0 .
KIT developed a detailed migration pipeline to mitigate the complexity of migrating highly templated code, cooperative groups, and atomics. It was a semi-manual process, so kernels were automatically migrated, and after some improvements to unified shared memory (USM) data handling and kernel submissions, The bulk of work focused on performance tuning and adding advanced features.
Learn more about the challenges KIT faced porting Ginkgo from CUDA to SYCL in the video from oneAPI DevSummit at IWOCL 2022 .
Optimizing Ginkgo Functionality on Intel GPUs to Accelerate Numerical Simulations Numerical simulations relying on sparse linear algebra are always constructed from the same building blocks, which are highly composable and configurable to adapt to a specific problem. This article highlights two essential building blocks of sparse iterative linear solvers. The first building block is the Sparse-Matrix Vector (SpMV) product, the most common and critical operation within sparse iterative solvers and several preconditioners. The second building block is problem-specific, advanced preconditioners, which accelerate the convergence rate of the sparse iterative solvers.
No Transistor Left Behind: Performance boost using Intel GPUs for Fast Sparse Matrix-Vector (SpMV) Products As the base building block of numerical linear algebra, having fast, sparse matrix-vector products is essential to accelerating a complete numerical simulation. One optimization is applied by combining multiple kernels, which are automatically selected depending on the properties of the sparse matrix at hand. A consideration for combining multiple kernels is, for instants, how imbalanced or balanced the matrices are.
Ginkgo’s design allows the implementation of different SpMV kernels depending on the backend. This allows for a highly flexible and adaptable approach to achieving each hardware’s best possible performance. Ginkgo also carefully tunes the key thresholds at which the SpMV strategy should be changed on a per-backend and hardware basis. Thanks to these optimizations, Ginkgo’s SpMV performance is consistently high on Intel® Data Center GPU Max 1550 on one tile.
On average, Ginkgo’s SpMV outperforms the oneMKL compressed sparse row format (CSR) matrix-vector implementation by a factor of 2.
For problems from the SuiteSparse Matrix Collection , this advantage can even reach 100x, as seen in the following graphics.
Batched Iterative Solvers for Selected Applications Ginkgo development and GPU porting did not stop at version 1.5.0. Batched iterative solvers have recently received much attention due to their efficiency in solving batches of small and medium-sized sparse problems. In particular, it has been shown that batched iterative methods can outperform the state-of-the-art batched direct counterparts for GPUs.
Batched iterative methods’ functionality is critical in applications such as combustion and fusion plasma simulations. These commonly need to solve hundreds of thousands of small to medium linear systems, each sharing a sparsity pattern. For the linear solution of these types of systems with nested non-linear loops, it is advantageous to use an iterative solver, as that allows the incorporation of an initial guess, which can accelerate the linear system solution within the outer loop. Additionally, we might not need to solve the system to machine precision accuracy but can control the solution accuracy based on the parameters of the outer non-linear loop.
By porting Ginkgo’s batched iterative solvers to SYCL and Intel GPUs, we enable these applications to take advantage of the high performance of the Intel Data Center GPU Max 1550. See the data in Figures 6 and 7, which show speedups with Intel Data Center GPU Max 1550 1son use cases from the PeleLM combustion simulation framework. Except for the gri12 case, all other input cases show a notable performance increase of the solvers on the latest Intel GPUs compared to NVIDIA GPUs. On average, the workload runs 1.7x and 1.3x faster on Intel Data Center GPU Max 1550 1s compared to NVIDIA A100 and H100, respectively, across all input cases. Similarly, the Intel Data Center GPU Max series 2s outperforms the A100 and H100 by an average factor of 3.1 and 2.4, respectively.
For more information, see the following paper on arXiv: Porting Batched Iterative Solvers onto Intel GPUs with SYCL .
Using Mixed-Precision Algorithms for Extra Performance Increases To further optimize the preconditioners available in Ginkgo, we leverage mixed-precision strategies when appropriate, which consist of doing parts of the computation in float or half precision while keeping critical computations in double precision to sustain a high accuracy. The Algebraic Multigrid (AMG) algorithm is a natural approach for such a use-case by performing the coarser computations within the multigrid (MG method) cycle at a lower precision. Thanks to this strategy, an extra 12% performance can be obtained when using Multigrid with the W-cycle at no cost in accuracy.
Scalability on HPC clusters The ability to use a full HPC cluster efficiently is critical for most scientific simulations. Ginkgo has developed a distributed backend by relying on MPI. The current MPI implementation is merely an extension of Ginkgo and requires very little change for users compared to running their workload on a single GPU. Using Ginkgo’s distributed backend is done by wrapping the matrices and vectors into new distributed::Matrix and distributed::Vector types that allow the user to specify the data distribution onto the nodes. In Figure 8, we show the Ginkgo SpMV’s weak scalability performance on the Sunspot early access platform on up to 1000 tiles (500 GPUs), where we can reach up to ~70 TFlop/s.
Use-Case example: Accelerating OpenFoam* Simulations on Intel GPUs High-fidelity (scale-resolving) flow simulations have become an important part of academic research and an indispensable tool for development processes in the wind energy industry, the automotive sector, aerospace engineering, and political decision-makers in environmental and disaster protection. However, many state-of-the-art software libraries are insufficiently prepared for modern, more energy-efficient, high-performance computers employing general-purpose GPU accelerators. In the EXASIM project, we close this technical gap by developing an interface between the popular simulation software OpenFOAM and the GPU-optimized linear algebra library Ginkgo.
While the project is still in its infancy and more performance gains can be expected in the future, leveraging several of the building blocks previously highlighted, the existing OpenFOAM-Ginkgo integration already allows OpenFOAM to run on Intel GPUs with performance speedup when comparing the Intel Data Center GPU Max 1550 with Intel CPUs.
We report in the following figures the complete timing for an OpenFoam simulation on the test case LidDrivenCavity3D of size 300^3. The code can run on Intel GPUs thanks to using Ginkgo’s solvers, distributed backend, and benefiting from the optimizations previously highlighted.
One Intel Data Center GPU Max Series on this test case performance roughly at the same level as a full CPU (4th Gen Intel® Xeon® Scalable Processor with 54 cores). The CPU’s High Bandwidth Memory (HBM) provides significant time savings on data transfers between the CPU and GPU. Thus, Ginkgo can efficiently use all 6 GPUs available on one node (12 tiles). This allows for a total performance speedup of 5x compared to using the 4th Gen Intel® Xeon® Scalable Processor by itself.
Conclusion The functional port of Ginkgo from CUDA to SYCL-enabled devices is a first step towards high-performance simulations on Intel® Iris® Xe Graphics and Intel® Data Center GPU Max Series . We have shown multiple performance improvements on key building blocks of scientific numerical simulations. In particular, we show how using the Intel Data Center GPU Max 1550 for batched sparse iterative solvers, we can outperform the NVIDIA A100 and H100 GPUs by an average factor of 3.1 and 2.4, respectively. We have also shown how leveraging Ginkgo’s optimizations by using Ginkgo as a backend to OpenFOAM runs with good performance and scalability on a node of 6 Intel Data Center GPU Max 1550 devices.
We will continue the kernel optimization and continue supporting integrating Ginkgo’s SYCL-enabled functionality into complex algorithms and application code. Ginkgo demonstrates that platform portability can be achieved without loss of performance, which opens opportunities for running scientific simulations at exascale on the latest supercomputer installations.
Notes and Disclaimers
10% to up to 25% rendering efficiency/thousands of hours saved in rendering production time/15 hrs per frame per shot to 12-13 hrs.
Cinesite Configuration: 18-core Intel® Xeon® Scalable processors (W-2295) used in render farm, 2nd gen Intel Xeon processor-based workstations (W-2135 and -2195) used. Rendering tools: Gaffer, Arnold, along with optimizations by Intel® Open Image Denoise.
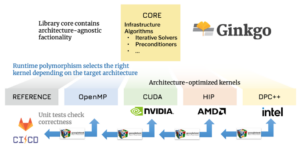 Figure 1: Architecture Optimized Kernels
Figure 1: Architecture Optimized Kernels Figure 2: Ginkgo Feature List
Figure 2: Ginkgo Feature List